Digital Twin of Objects
This research project got me into training custom ML models for computer vision, and integrating 3D tracking with embedded IMU electronics.
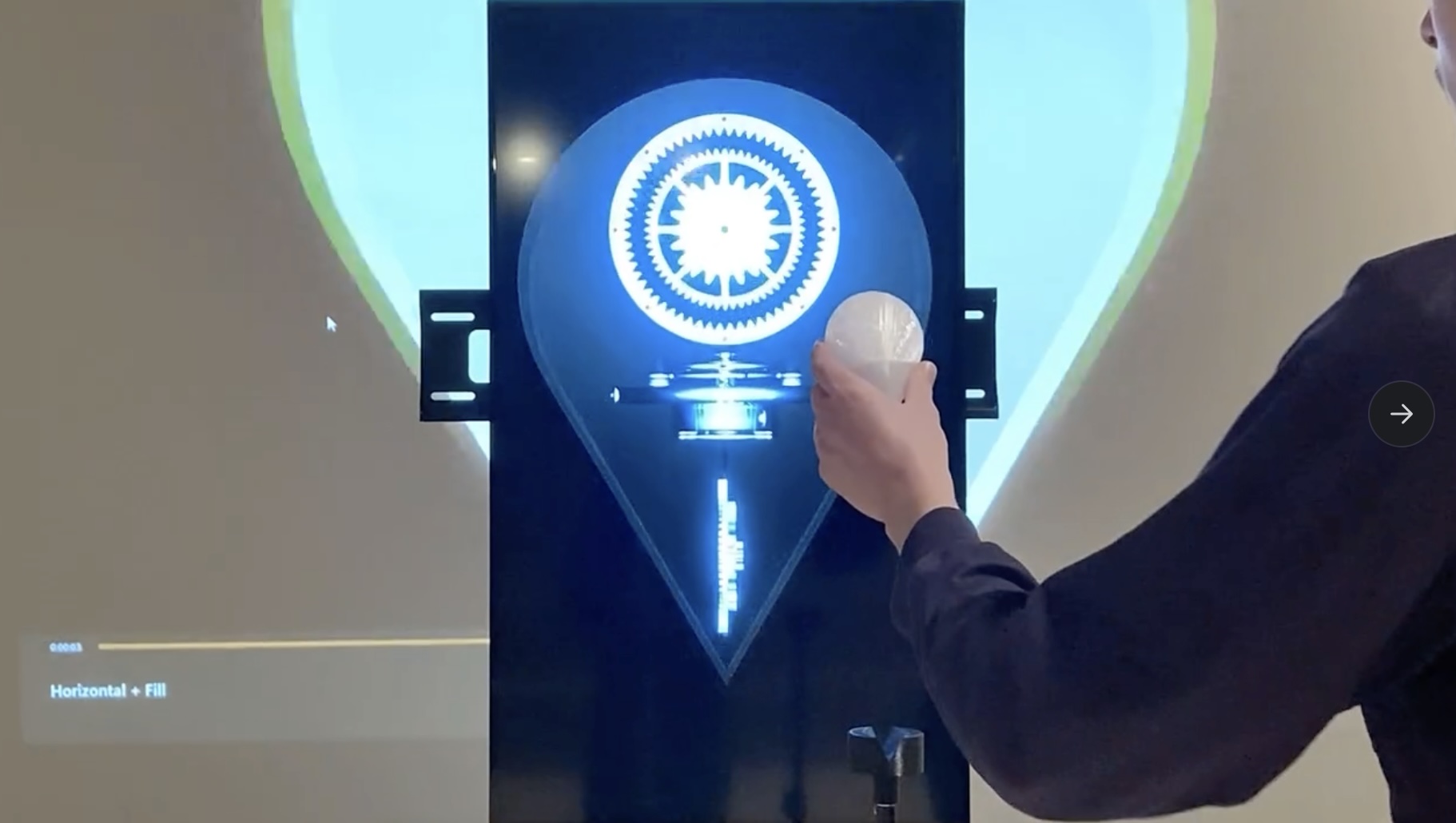
This was an "experiment" or in-house research project, tentatively named "Digital Twin of Objects". The idea was to explore how to represent and interact with a digital mirror image of any object (e.g. a product) on screen.
This is not a new problem, but hardware solutions for precisely tracking objects in space - for example, using triangulation with radio, or enhanced GPS - tend to be complex and expensive. Some approaches make sense at large scale, outdoors (e.g. drones), but it gets very challenging when you need to track something small in a space that has no line-of-sight to GPS satellites.
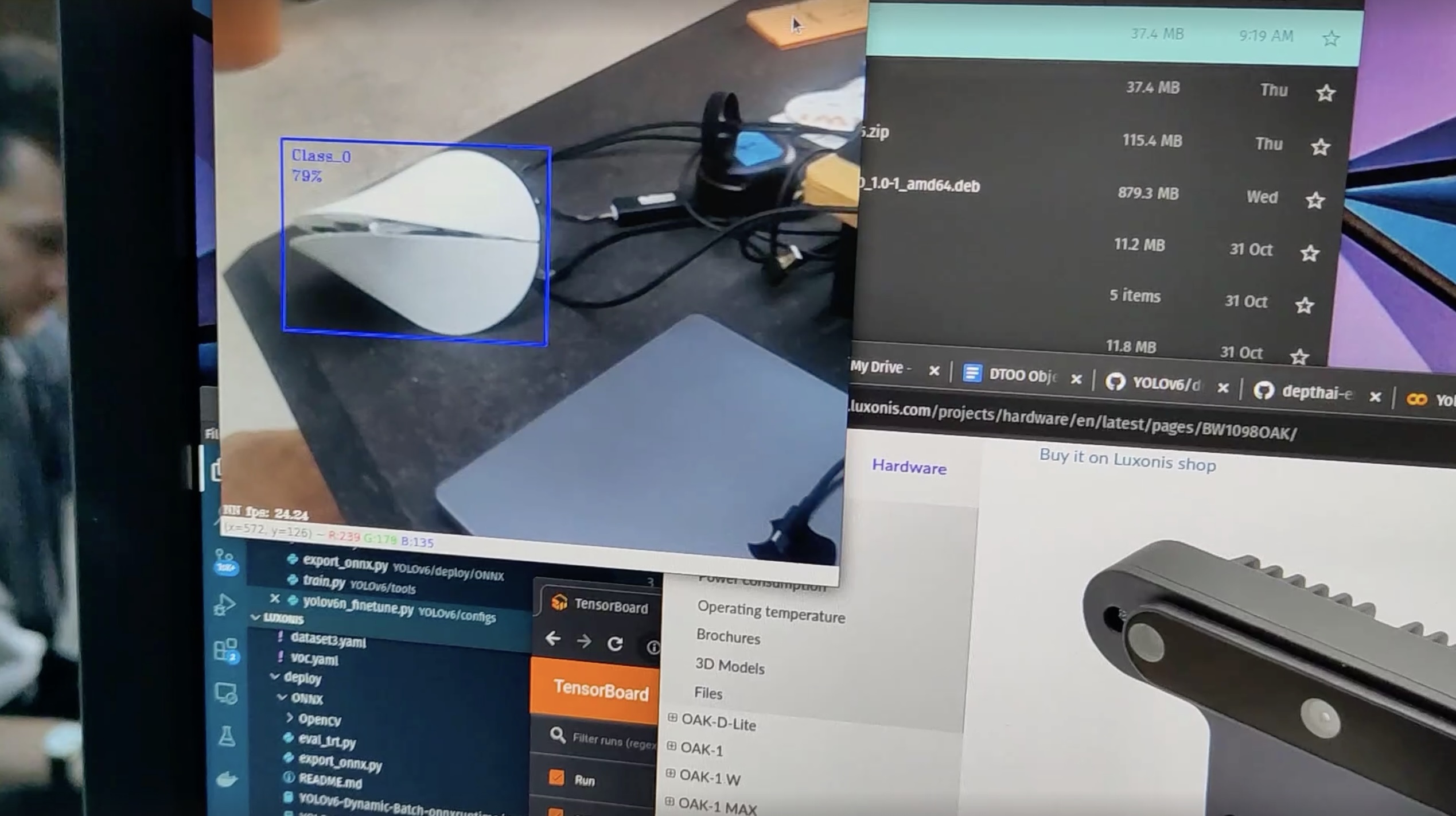
On the technical side of this project, I devised a hybrid solution: Machine-Learning computer vision for positional tracking, and embedded IMU sensing for accurate rotation and fast movements (acceleration). I chose to use the Oak-D camera so that I would be able to track in 3D (including "depth").
Working like this allowed the technologies to complement each other:
- IMU (accelerometers plus magnetometer/gyro)
- STRENGTHS: Accurate and fast rotational data, highly sensitive for small movements (acceleration)
- WEAKNESSES: Attempting to add acceleration over time for positional tracking ("dead reckoning") will inevitably drift
- Computer Vision (with aligned depth camera)
- WEAKNESSES: Difficult to determine rotation of an object in any reliable way, especially for certain shapes.
- STRENGTHS: A well-trained object recognition model should be able to determine bounds (in 2D) quickly and reliably. Any errors could be smoothed and filtered.
We had a fairly generic "oloid" shaped dummy object to experiment with. I embedded an ESP32 microcontroller and an Adafruit 9-DOF sensor and powered it with a small Li-ion battery. Data was sent over WiFi using the Tether system I had helped to develop in-house.
I used YoloV6 as the basis for a custom-trained model.